LeSim ist ein Simulator für Leistungselektronik ( Leistungselektronik
Simulator)
Der Simulator hat jetzt alle wesentlichen Bibliotheksbausteine: OR@20170304
Der Simulator wird ständig erweitert: OR@20190607
Der Simulator ist ein sogenannter "mixed-mode Simulator". Es können gleichzeitig
leistungselektronische Schaltungen sowie die dazugehörige Regelung simuliert
werden. Dies geschieht alles auf der Browserseite mithilfe von Javascript.
Je nach Umfang des Simulationsmodelles darf der Prozessor durchaus etwas
mehr Rechenleistung bieten.
Als Browser empfehle ich den Edge, Chrome/Chromium oder Firefox. Der Microsoft
Internet Explorer wird nicht unterstützt (zu buggy und zu langsam). Als schnellster
Browser hat sich bei mir (Stand Juni 2016) der Microsoft Edge empfohlen.
Die Entwicklung des Simulator erfolgt aber unter dem Chrome.
Da mich meine bisher genutzten Simulatoren enttäuscht haben, habe ich mich entschlossen
einen Simulator selber zu schreiben.
Dieser Simulator legt Wert darauf dass:
Die Priorität des Simulators bei Leistungselektronik liegt
Die Mathematik gerade bei Schaltvorgängen passt
Die Präsentation der Ergebnisse gut möglich ist
kein spezielles Betriebssystem oder Hardwareplattform vorrausgesetzt wird
Eine einfache Möglichkeit zur Erweiterung gegeben ist
Eine akzeptable Geschwindigkeit erreicht wird
Elektro-Mathematisches
Der Netzwerksimulator beruht auf einer Knotenpotentialanalyse. Das implizite Euler-Verfahren
wird als Integrationsverfahren verwendet. Eine Schrittweitensteuerung findet
nur bei Schaltvorgängen statt, eine toleranzabhängige Schrittweitensteuerung
erfolgt nicht.
Knotenpotentialanalyse:
Jedes Netzwerkelement ist mit zwei oder mehreren Knotenpunkten verbunden.
Hierbei berechnet jedes Netzwerkelement anhand von gegebenen Knotenspannungen
die Ströme in den Knoten zum neuen Zeitschritt aus.
Die Aufgabe des Gleichungslösers ist es jetzt, die Knotenspannungen so zu
wählen, dass die Summe der Knotenströme null ist.
Es entsteht also zu jedem Zeitpunkt eine Gleichung: IKnoten[1..k] = f( VKnoten[1..k] , Zustaende )
Jedes einzelne Netzwerkelement rechnet also seine eigenen Knotenströme anhand der gegebenen
Knotenspannungen unter zuhilfenahme eventueller gespeicherter Zusstände aus und addiert dies Ströme
zum Gesamtknotenstrom hinzu.
Es entsteht mathematisch gesprochen also eine Matrixgleichung: r = A*x - b, wobei r die Summe der
Knotenströme, x die Knotenspannungen, A die Leitwerte und b die gespeichterten Zustände sind. Das
besondere an diesem Simulator ist aber das die Werte für A und b nur implizit vorliegen, also ein
direkter Zugriff nicht möglich ist.
Die Funktion StepCalc (von allen genutzten Elementen) wird vom Gleichungslöser
immer wieder mit unterschiedlichen Knotenspannungen aufgerufen, bis die Summe
der Knotenströme Null ist. Wenn dies erreicht ist, wird zum Abschluss die
Funktion StepFinished aufgerufen. Hier kann dann der Intergationswert als
neuer Startwert gesetzt werden.
Als Gleichungslöser wird GmRes
eingesetzt. Als Fallback wird LU verwendet. Eine
Übersicht der genutzten Matrizen findet man auf der Beispielseite zum
Solver.
Bei jeder Simulation werden ausgewählte Matrizen serverseitig gespeichert damit
diese nachträglich mit verschiedenen Gleichungslösern überprüft werden können.
Alle Parameter eines Simulationselementes fangen mit "p_" an. Diese Parameter können über
die grafische Oberfläche gesetzt werden. Auch werden diese Parameter über json gesichert.
Simulation selber erstellen
Die Erstellung der Simulation erfolgt halbgrafisch. Die Simulation gliedert sich in 2 Teile:
Anzeige und Steuerung
Dieser Teil muss in HTML manuell ausformuliert werden. Hier muss die Simulatorsteuerung als auch die Anzeigelemente plaziert werden.
Simulator
Der Simulator wird weitgehend über das json-file geladen und arbeitet als Bibliothek im Hintergrund. Zum Simulator können
auch einzelne Elemente zur Laufzeit hinzugefügt, gelöscht oder modifiziert werden.
Die einzelnen Elemente
können grafisch platziert werden. Die Simulation selber muss von Hand über
die Webseite geladen und gestartet werden. In dieser HTML-Datei werden dann
auch die einzelnen Elemente und die Verbinder geladen.
Die Verbindungspunkte müssen nicht zwingend beschaltet werden. Dies ist zum Beispiel
sinnvoll wenn eine dreiphasige Spannungsquelle nur zweiphasig genutzt werden
soll.
Ebenso muss kein Bezugs / Erdpotential angegeben werden.
Beim Erstellen der Simulation müssen mindestens zwei Files erstellt werden:
index.html
schematic.json
Im index.html File wird das Layout, die Simulatorsteuerung und die graphische Ausgabe
definiert. Das schematic.json File dient der Aufnahme der zu simulierenden
Elemente und der Connectoren.
Ein Schematic kann durch Hinzufügen und Löschen von einzelnen Elementen verändert
werden. Die einzelnen Eigenschaften der Elemente können geändert werden.
Dazu befinden sich drei Steuerelemente an jedem Element (löschen, drehen,
Eigenschaften). Zusätzlich kann durch anklicken und ziehen der Connectoren
eine neue Verbindung geschaffen werden.
Damit die dabei geschaffene Simulation dauerhaft gespeichert werden kann, muss
der komplette Inhalt des JSON Fenster in das schematic.json File kopiert
werden.
Steuerungssimulator
Dieser Simulator arbeitet mit einer festen Schrittweite. Die Schrittweite muss/wird
beim Simulatoraufruf übergeben werden.
Die Steuerungelemente werden in genau der Abarbeitungsreihenfolge abgearbeitet,
wie sie in den Simulator geladen wurden. Die Reihenfolge im Schematic.json
file ist also nicht variabel, sondern muss die gewünschte Abarbeitungsreihenfolge
abbilden.
CTRL_step: function (arg) {
let Blocks = arg.Blocks;
let t = arg.t1;
let dt = arg.dt;
...
Jeder Steuerungsblock verfügt über eine Routine mit dem Namen "CtrlStep". Diese
Funktion wird zyklisch vom Simulator ausgeführt.
Netzsimulator
Dieser Simulator arbeitet mit einer variablen Schrittweite. Die minimale und maximale
Schrittweite muss/wird beim Simulatoraufruf übergeben werden. Der Simulator
startet immer mit der maximalen Schrittweite. Meldet ein Netzwerkelement
einen Schaltvorgang wird der aktuelle Rechenschritt verworfen und die Schrittweite
habliert. Dann wird neu gerechnet. Ein Rechenschritt ist erst dann gültig,
wenn:
kein Schaltvorgang angemeldet wurde, oder
die minimale Schrittweite erreicht ist
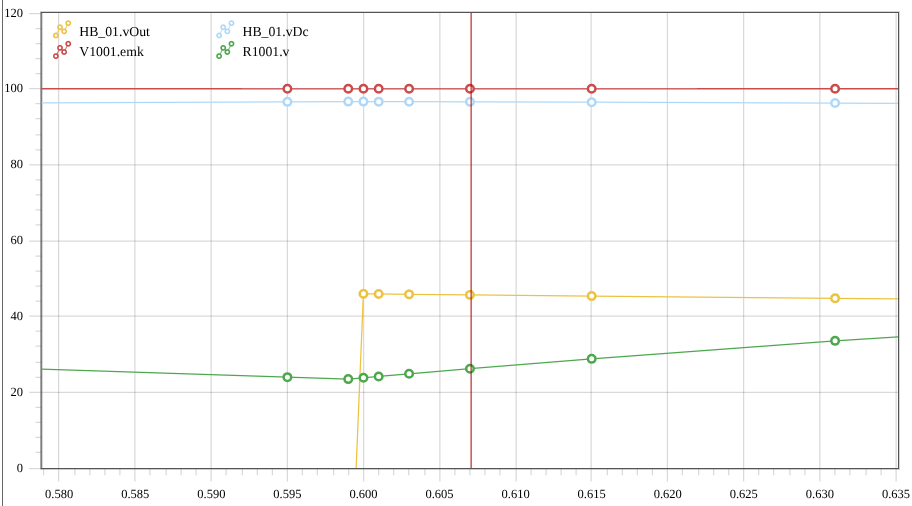
Die Schrittweitensteuerung kann man gut am Beispiel für den Tiefsetsteller
sehen. Mit der Maus kann in die einzelnen Schaltvorgänge reingezoomt werden.
Eine ideale Schrittweitensteuerung würde direkt vor und nach einem Schaltvorgang einen
Berechnungspunkt setzen.
Wenn man den Zeitpunkt 0.6ms genau rauszoomt (zurück geht mit Doppelclick) kann man erkennen, dass der Simulator jeweils kurz vor dem Schaltmoment und kurz nachher
einen Berechnungspunkt gesetzt hat. Der Simulator ist also im Schaltmoment auf die minimale Schrittweite von 1us gegangen.
Nach Ende des Schaltvorganges beginnt die Schrittweitensteuerung wieder mit der Verdoppelung der Schrittweiten, bis entweder die maximale Schrittweite erreicht ist, oder ein weitere Schaltvorgang passiet.
.
Als Beispiel kann man hierzu gut die Diode nehmen. Ein Diode schaltet bei positiver Spannung ein und bei negativem Strom aus.
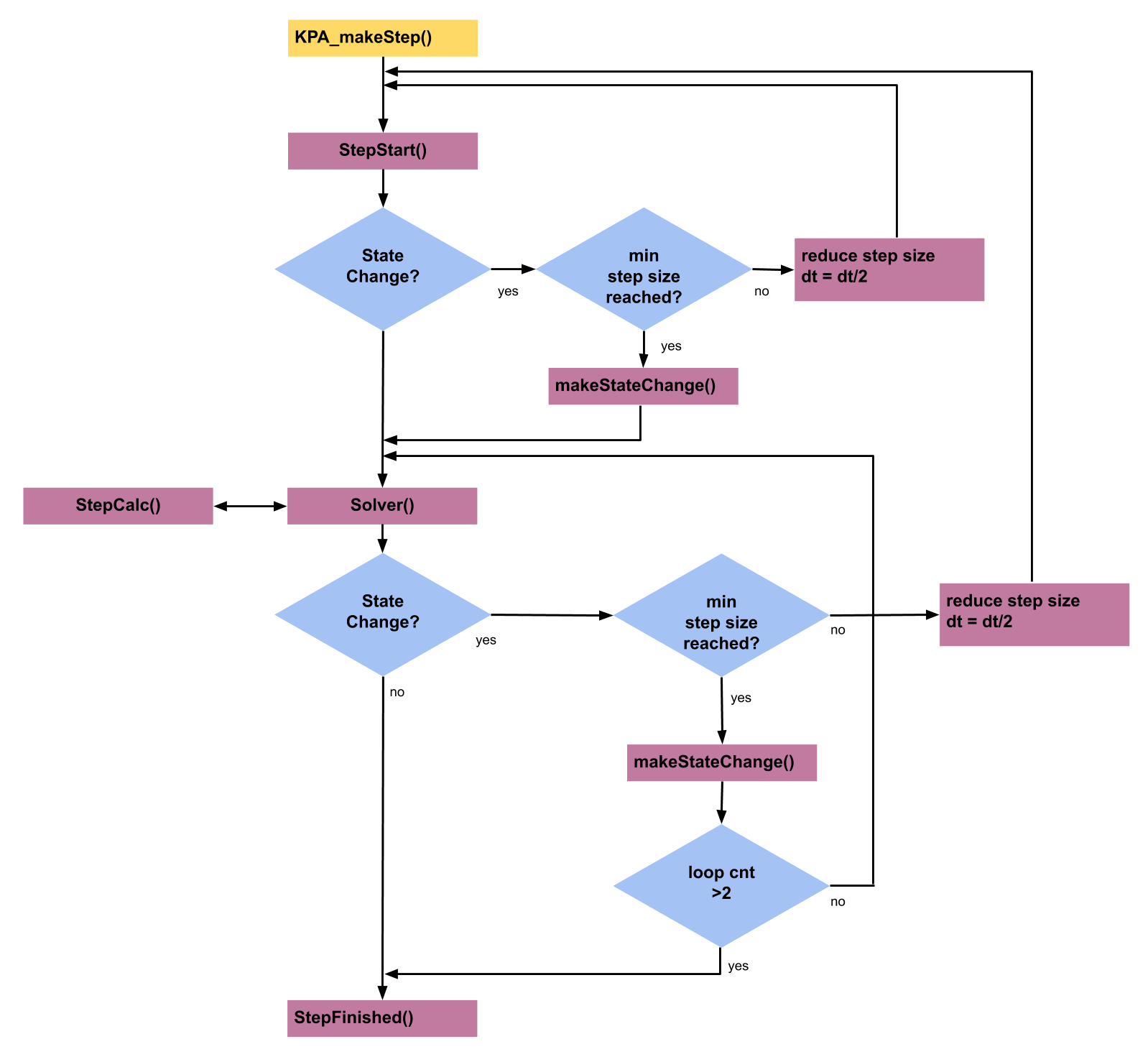
Immer wenn ein Schaltvorgang ansteht, muss dies angemeldet werden, damit der Netzwerklöser die Schrittweite verkürzen kann. Ob
die Diode schaltet oder nicht schaltet, wird erst nach der Lösung der Differentialgleichung klar. In der Funktion KPA_start()
darf also die Entscheidung für einen Zustandswechsel nicht fallen.
Der Simulator ruft nach abgeschlossener Knotenpotentialanalyse die funktion KPA_stateChangeAnnounced auf. Hier darf jedes Element anmelden, ob in diesem Zeitschritt ein Zustandswechsel gewollt war. Falls ein Zustandswechsel erwünscht ist, wird der aktuelle Zeitschritt verworfen und die Schrittweite halbiert.
Dann wird erneut gerechnet. Falls der Block einen Zustandswechsel anmeldet und gleichzeitig die aktuelle Schrittweite kleiner/gleich der minimalen Schrittweite ist, wird der Block zur Zustandsänderung vom Simulator aufgefordert.
Dies geschieht durch die Funktion KPA_makeStateChange.
Zu beachten ist, das der Zustand selber in der Funktion KPA_solve() nicht geändert werden darf. Die Funktion KPA_solve() wird vom
Differentialgleichungslöser sehr oft aufgerufen um den aktuellen Arbeitspunkt zu iterieren. Die Abhängigkeiten innerhalb der Funktion KPA_solve()
müssen immer linear sein.
dtmax: die maximale Schrittweite des Netzwerksimulators
dtmin: die minimale Schrittweite des Netzwerksimulators
dtCtrl: die Schrittweite des Steuerungssimulators
deltaTEnd: die Zeit bis zu der der Simulator rechnet
Download
Die Simulationsbibliothek ist is Javascript geschrieben. Es müssen mehrere Bibliotheken
eingebunden werden. Achtung: ich erweitere sowohl die Simulatormathematik
als auch die Bibliotheken öfter.